会津に戻り、少しのんびりの生活が始まりました。
昨日付けで、いわきの企業を退職して、引越しも昨日で終了。
昨日は、自分なりで祝勝をおこない一杯・・・・・久しぶりの安眠でした。
仕事中に油圧機器の開発に少しだけ かかわりましたが、油圧機器のロボット開発でしたが、聞いてみると、ロボットの言葉が・・・・・実は、リモコンでした!
リモコンですかた遠隔でテクニシャンが機器をリモコンで操作しておりました。テクニシャンがどうしても必要とのこと・・・この業界は、3Kの職場で後継者がいないのが問題とか・・その意味でロボット化が、急務とのこと
本来、ロボットが代わってテクニシャンのやる事を行う事が、本来の意味ではロボットと思われる。
実際 技能者は、リモコンから伝わる、アナログ信号の取り込みの映像・音・振動を遠隔モニターで操作をしていました。 さらに離れた遠隔だと音などの伝わってこないのでその操作は、さらに困難になります。
これを本来のロボットとするには・・・・・考えて見ました。
世の中の製造機械等は、制御にはリミットセンサーで位置の制御を行っています。これをロボット呼べるのかは不明である、ロボットとは・・・・・
その定義が一様でないように思われる。
このような機械と、テクニシャンが行う作業を比べると、熟達者は、基本的に作業の終焉時期に加減を行う。これを機械行わせるには、非常に難しい。
機械は、リミット(パルスモーター)で、プログラムでリミットまで動く・何ステップ動く事を指定されている為、
この、加減をプログラムに付加することが出来ればいい
また、ロボット・・・・人の上腕を考えると
腕は、骨に筋肉が付いており、この伸縮で腕の動きを行っている。
人の腕には、当然センサーなんてものはありません。どうして変位を見ているのか!? 筋肉の伸び縮みのアナログ信号で変位をフィードバックしている、さらには、視界。
変位リミットは、骨格によりメカニカル??リミット。この思考プロセスをすり込めばいいと思われる。
油圧機器などでは、アナログセンサーからの信号を使うわけですがそれは、モニターのみでそれで制御は行っていない。
これを制御に使うとすると、ここで最も重要なのは、
信号処理
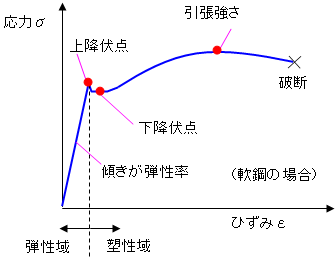 簡単に閾値・・アナログはかなり変動が大きいので閾値では、機器を動作することは困難でしょう。
簡単に閾値・・アナログはかなり変動が大きいので閾値では、機器を動作することは困難でしょう。これは、自分にはファミリアである鉄の降伏グラフこんな波形を使って機器を制御する。
これを油圧の変化グラフと見てこれをどうやって信号処理を行うか???
かなり困難です普通に考えて
しかし、世の中にはこのような信号処理に得意な分野があります、
半導体です、その中で特化しているのが、ドライエッチングの終点検出
この機器は、薄膜の処理を得意としておりますが、薄膜の剥離の微妙なアナログ信号の処理をほぼ100%精度で特定し製品の処理をおこなっている。
このアルゴリズムを先の機器制御に使えば、アナログ信号の変化のあらゆるところで、エンドポイントを出力させられ、それで次のシーケンシャル制御に移す事が可能となる。
この程度の波形であれば
マスキング
差分
積分
このアルゴリズムで可能でしょう。
理想は、座標変換を伴うベクト制御・・・・これを実現するには、現在のPCパワーで十分可能!
2次元の変位に時間軸を考慮した3次元ベクトル制御
理想は近い!
過去に、波形の判断プログラムを書いた事があります。ここでは、差分・積分 さらには、ここにランキング(これは経験値)を適用して人の見た目とプログラムの判断がより近いものを

0 件のコメント:
コメントを投稿